الکترونیکیها
اطلاعات در مورد الکترونیک و مدارات الکترونیکالکترونیکیها
اطلاعات در مورد الکترونیک و مدارات الکترونیکآموزش ربات تعقیب خط با میکروکنترلر AVR - قسمت سوم
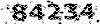
راه اندازی و کنترل موتورهاخب همونطور که در قسمت اول گفتیم ربات برای راه رفتن احتیاج به موتور و چرخ داره!ولی آیا میشه موتور رو مستقیم به باطری وصل کرد و ربات و روی زمین مسابقه گذاشت؟؟؟طبیعتا جواب این سوال نه است ،چون که اگر موتور مستقیم به باطری وصل شود دائما کار کرده و ربات مستقیم راه میرود!برای اینکه بتوانیم سر پیچ ها و زمان استپ ،ربات خود را به چپ و راست هدایت کرده یا متوقف سازیم احتیاج به قطع و وصل جریان موتور داریم؛ اینکار با کلید انجام میشود ،ولی ما که نمیتونیم دو رشته سیم به یک کلید وصل کنیم و اونو تو دستمون بگیریم و ربات رو کنترل کنیم!!باید از کلید های الکترونیکی استفاده کنیم نه کلید فیزیکی!!!در اینجا ما از ترانزیستور به عنوان کلید الکترونیکی استفاده کرده ایم!برای مثال به شکل زیر نگاه کنید
اگر پایه بیس ترانزیستور یک باشد LED روشن میشود چون ترانزیستور مانند یک کلید بسته عمل میکند!حال اگر مانند تصویر زیر بیس ترانزیستور صفر باشد LED خاموش میشود .
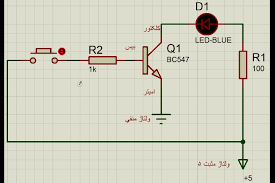
همین کار را برای موتور انجام میدهیم با تفاوت اینکه چون موتور یک سیم پیچ دارد باید یک دیود در حالت بایاس معکوس با موتور موازی شود ،برای محافظت از ترانزیستور در برابر ولتاژ معکوس لحظه ای سیم پیچ موتور میباشد مانند تصویر زیر
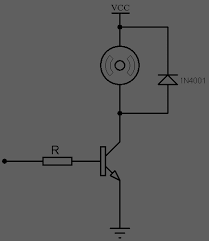
خب این هم ساده ترین شکل ممکن برای روشن و خاموش کردن موتور dc ،ولی برای چپگرد یا راست گرد کردن موتور میتوانیم از مدار زیر استفاده کنیم ولی چون ربات ما فعلا خیلی ساده است احتیاجی به این مدار نداریم
اگر به ورودی EN1 و EN2 همزمان یک یا صفر منطقی (پنج ولت یا صفر ولت) اعمال شود موتور استپ (متوقف) میشود و در صورتی که یکی صفر و یکی دیگر یک باشد بستگی به پلاریته موتور چپ گرد و راستگرد میشود.
قسمت بعدی : نحوه چیدمان سنسور ها و اتصال به میکروکنترلر و تشخیص سمت خط مشکی