الکترونیکیها
اطلاعات در مورد الکترونیک و مدارات الکترونیکالکترونیکیها
اطلاعات در مورد الکترونیک و مدارات الکترونیکآموزش ربات تعقیب خط با میکروکنترلر AVR - قسمت اول
آموزش ربات تعقیب خط با میکروکنترلر AVR - قسمت اول
سلام امروز همونطور که معلومه قراره آموزش ساخت یه ربات مسیریاب یا همون تعقیب خط رو بهتون آموزش بدم!پس همراهم باشید تا شروع کنیم.
قبل شروع یه نکته رو بهتون بگم ،اونم اینه که قرار نیست تو همین پست همه چیز رو بگم چون مباحث مربپطه زیاده و میخوام به آسون ترین شکل ممکن توضیح بدم تا همه بتونن یاد بگیرن ،پس تصمیم گرفتم که توی پنج قسمت آموزش رو تکمیل کنم.
خب بریم سراغ آموزش.
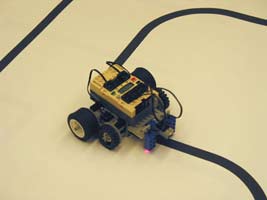
همونطور که از اسم ربات معلومه ،این ربات قراره که یه مسیر تعیین شده رو تشخیص بده و تو اون مصیر حرکت کنه. این مسیر عموما یک زمین سفید رنگ با خطوط مشکی هستش که ربات خطوط مشکی رو دنبال میکنه تا به مقصد برسه.
ربات چطوری ابن کار و میکنه؟؟
خب همونطور که ما انسان ها برای تشخیص راه از چشم هامون استفاده میکنیم ،ربات هم یه سنسورهایی داره که مثل چشم ما عمل میکنن و مسیر رو به ربات نشون میدن ئه عموما از سنسور های مادون قرمز استفاده میشه!
همونطور هم که ما با مغزمون تصمیم میگیریم از کدوم راه بریم ،ربات هم احتیاج به یک مغز داره که اینجا از میکروکنترلر ها که یکسری تراشه های قابل برنامه ریزی هستند استفاده میشه !خب فقط میمونه یه مرحله ،اونم حرکت هستش ما انسان ها از پا برای حرکت استفاده میکنیم ،ربات ها برای حرکت از موتور و چرخ استفاده میکنند!تا یادم نرفته بگم ما فرمان حرکت پا رو از مغز توسط رشته های عصبی ارسال میکنیم ،خب ربات هم یه چنین چیزی داره اونم سیم های ارتباطی هستن.نکته مهم و داشت یادم میرفت برای اینکه بتونیم همه اینکارا رو انجام بدیم نیاز به انرژی داریم که با خوردن غذا کسب میکنیم ،ربات ها هم از این قاعده پیروی میکنن و برای کسب انرژی نیاز به منبع تغذیه یا باطری دارن.